Phase 01
System Definition & Automation Strategy
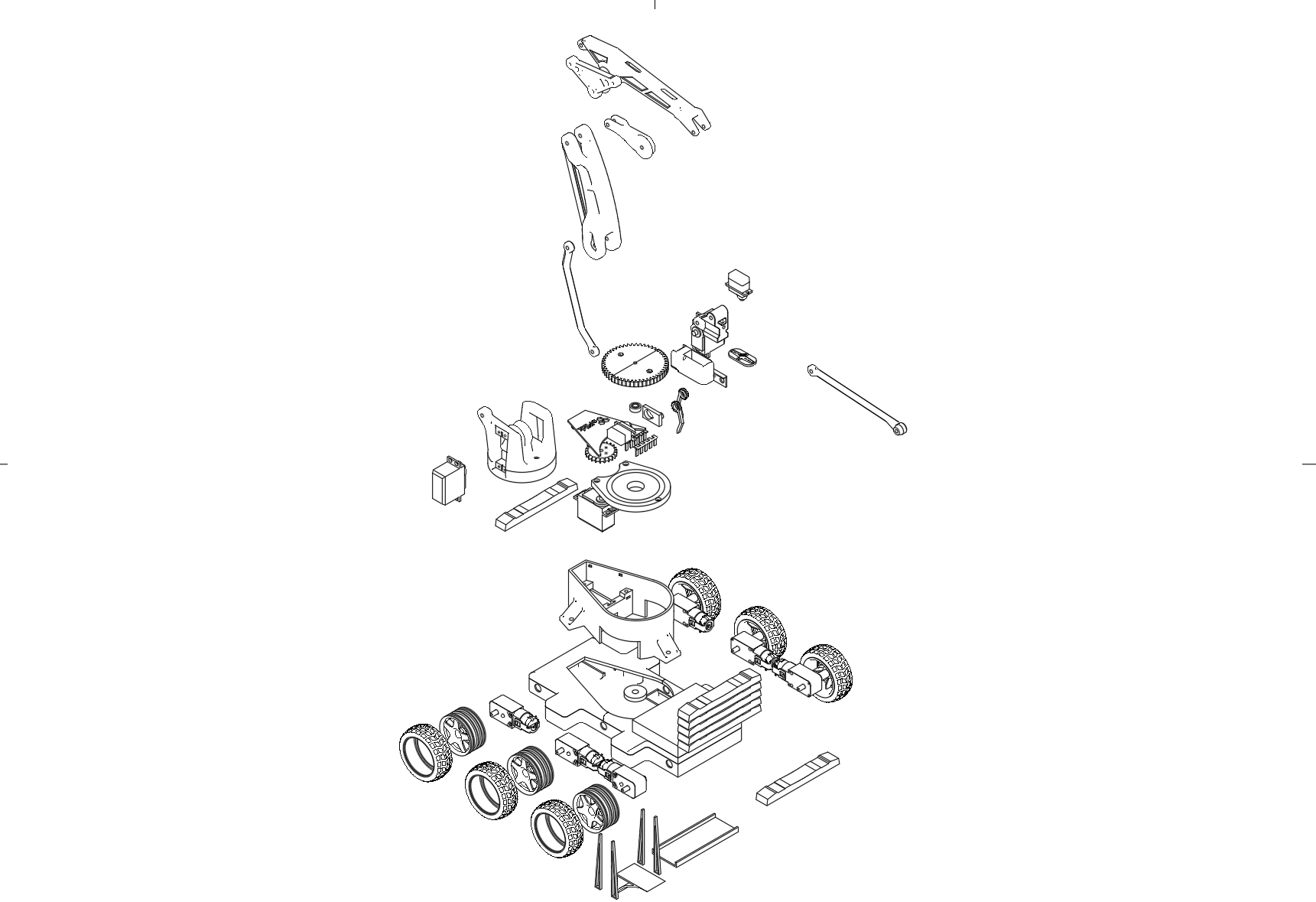
Phase 02
Mechanical Integration & Hardware Architecture
Phase 03
Control System Design

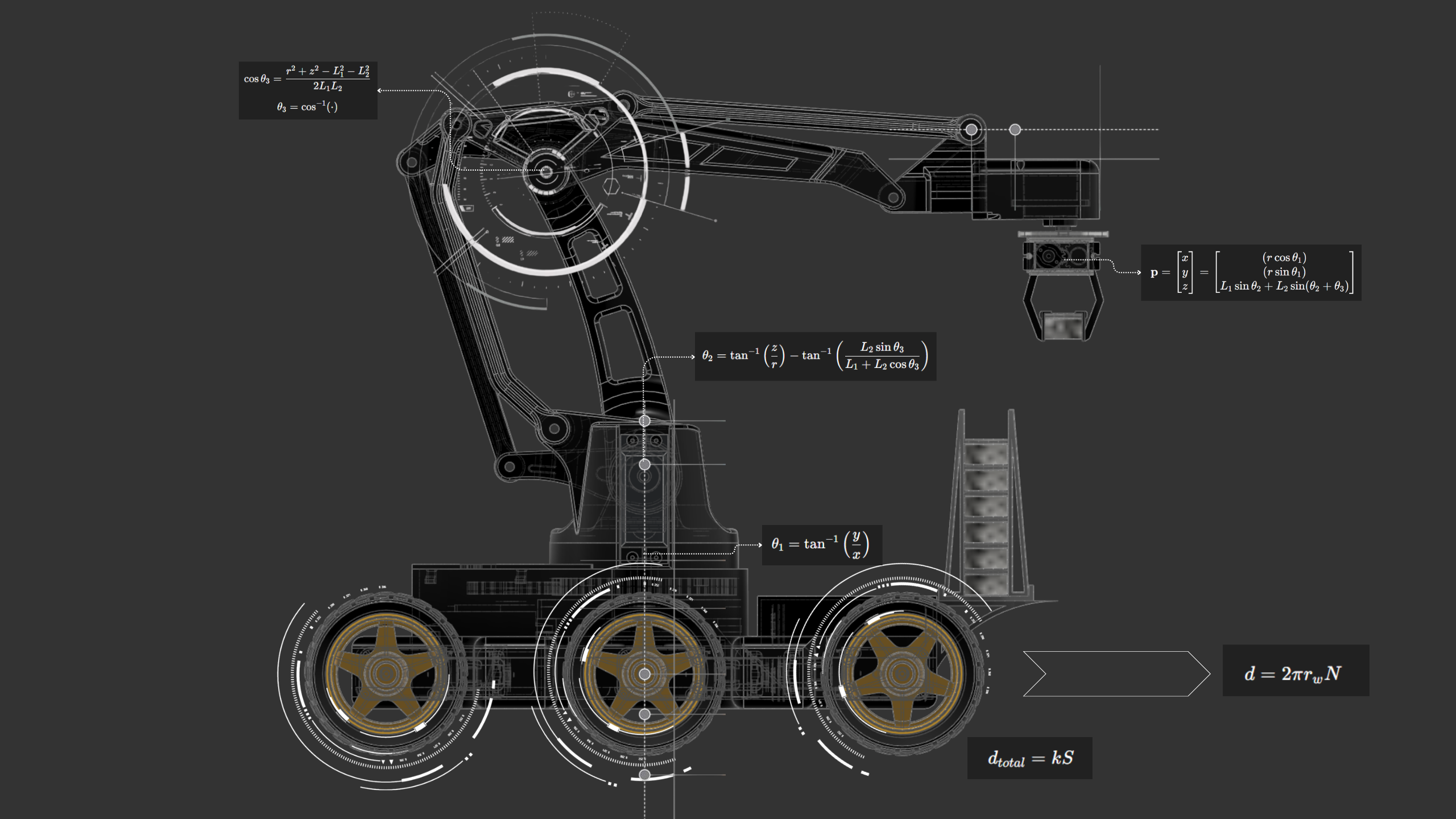
Phase 04
Kinematic Modeling & Displacement Logic
Phase 05
Calibration & Performance Evaluation
