Phase 01
Kinematic Architecture & System Definition

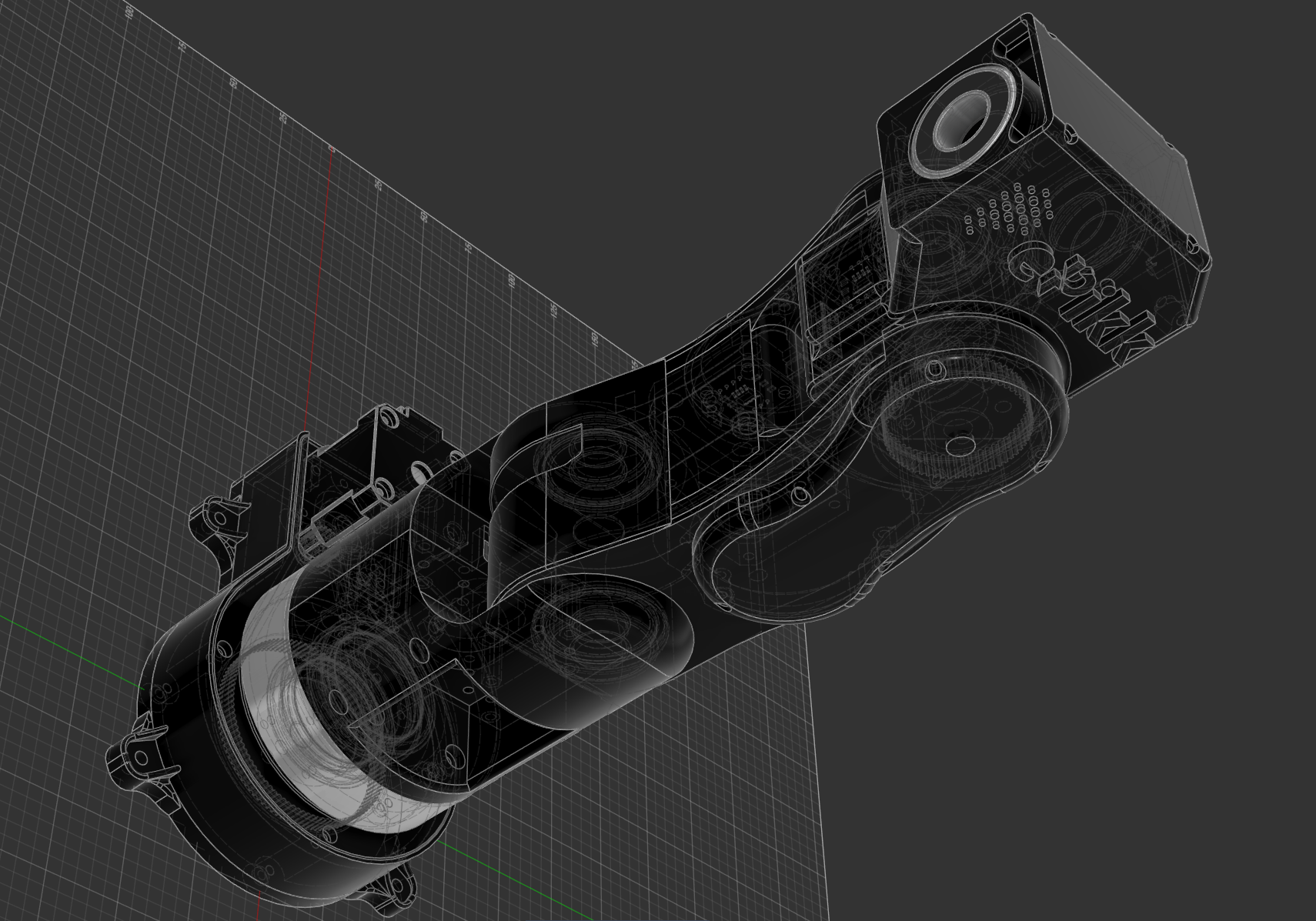
Phase 02
3D Modeling & Structural Design Optimization
Phase 03
Base Assembly Engineering

Phase 04
Actuation Strategy & Torque Planning

Phase 05
Electronics Architecture

Phase 06
TO BE CONTINUED ...